AdderLink iPEPS コンフィグ (JA)
内容
1.はじめに
2.T-Planロボットの構成
3.KVMシステム構成
1.はじめに
このドキュメントでは、T-Plan Robotと AdderLink iPEPS KVMスイッチ間のVNC接続の設定方法について説明します。
2.T-Plan Robotの構成
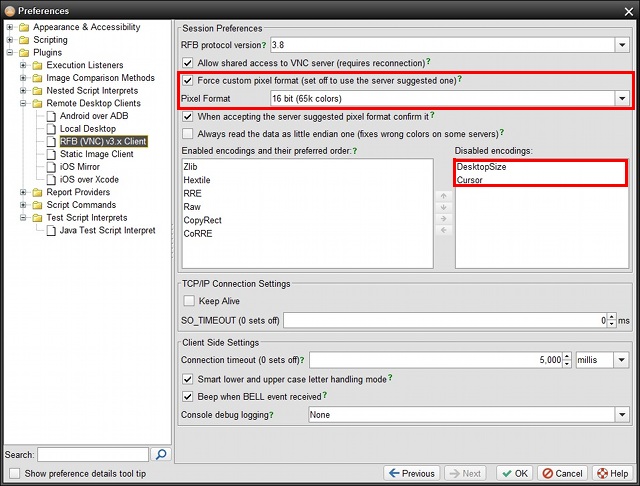
編集-> T-Plan Robot メニューの 編集-> 項目から環境設定を開き、 RFB (VNC) 3.x クライアント パネルを選択します:
「カスタムピクセルフォーマットを強制(…)」 オプションを設定し、16ビットまたは8ビットフォーマットのいずれかを選択してください。デフォルトの24ビットフォーマットでは青みがかった色調で表示されます。
カーソル および デスクトップサイズ エンコーディング。
3.KVMシステム構成
KVMはRealVNCサーバーを実行しており、Robotから 「VNCサーバー」 接続を使用して接続できます。
よく発生する問題として、マウスの同期が乱れることがあります。互いに距離を置いた2つのマウスポインタが表示され、マウス操作(クリック、ドラッグ)が誤った位置で実行されます。 これはKVMシステムの設定ミスであり、T-Plan Robotの問題ではありません。 修正するには、KVMシステムで以下の手順を実行してください:
MS Windows
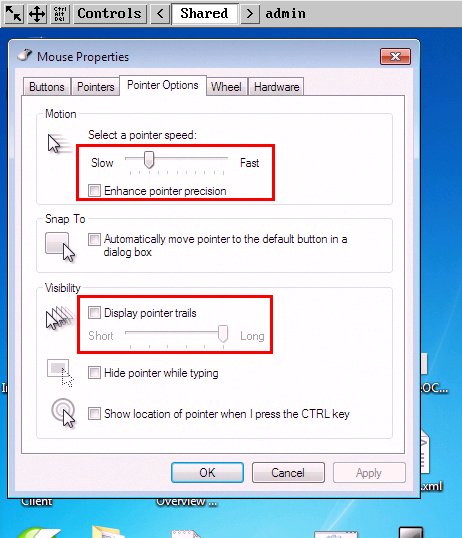
システム設定から マウスのプロパティ ウィンドウを開きます:
「ポインタの精度を高める」と「ポインタの軌跡を表示する」オプションがオフになっていることを確認してください
マウスの速度を遅く設定する
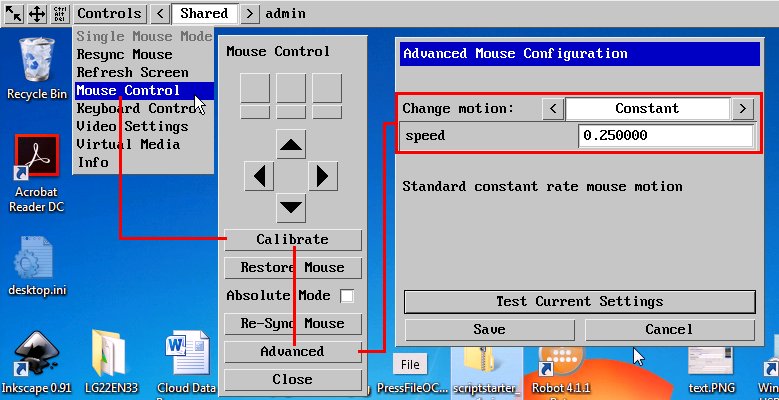
設定後、画面上部のKVM注入メニューを使用してマウスを再調整してください:
コントロール->マウス制御 を選択し、 キャリブレーションをクリックします。指示に従ってください。
「詳細設定」 を選択し、 「 Change motion」 オプションが 「Constant」に設定されていることを確認してください。その下の数値は、システムのマウス設定で選択したマウス速度によって異なり、環境によって異なる場合があります。マウス速度を変更した場合は、再キャリブレーションが必要です。